
はじめに
意外と身の回りには「制御」が存在しますが、それらは同じ制御方法によって働いているとは限りません。
どのような制御方法があるのか、どう日常生活に応用されているのか、ということについて説明していきます。
制御が用いられる実用例
数ある制御の中から (ⅰ)ロバスト制御、(ⅱ)H∞制御、(ⅲ)ファジィ制御 について実用例を交えながら簡潔に紹介していきます。
(ⅰ)ロバスト制御
モデル化誤差やパラメータ変動などの制御対象の不確かさ(これは摂動と呼ばれる)を設計段階から許容し、粗い近似モデルに基づく制御でも性能が保証できるよう、頑健な(robust)制御系を設計する手法全般を指します。
不確かさや変動には以下のような例が挙げられます。
・ 経時変化、経年変化: 長い年月を経て制御対象の物理的特性が変化したり、電源を入れた直後と十分にウォームアップされた状態では特性に変化が生じたりしていることがある
・ 使用環境の変化: 温度による抵抗値や摩擦係数の変化、負荷の変動など
・ 製造ばらつき: 製品を大量生産するほど微妙に特性が異なる製品が多くなる
メカニカル系におけるばね定数や質量、粘性摩擦といった物理パラメータの変動は構造化摂動と呼ばれます。
一方で、現実世界では剛体系であるはずの制御対象が実際には機械共振を持つことがあります。
しかし、そのような共振特性のモデル化は難しかったり、個体間でばらつきがあったりする場合が多くなります。
このようにモデル化できない摂動は非構造化摂動と呼ばれ、乗法的摂動と加法的摂動がよく知られています。
乗法的摂動∆_mは摂動を含む制御対象をP’、ノミナルモデル(摂動を0としたときのモデル)をPとしたとき、次式で表せる摂動です。
一方、加法的摂動 ∆_a は次式で表せる摂動です。
ロバスト制御はロバスト安定化問題とロバスト性能問題に大別できます。
前者はすべての摂動に対して制御系の安定性を保証する問題のことで、後者はすべての摂動に対して制御性能を保証する問題のことです。
ロバスト性能が達成されるためにはロバスト安定でなければならず、一般にロバスト性能問題の方が難しいとされています。
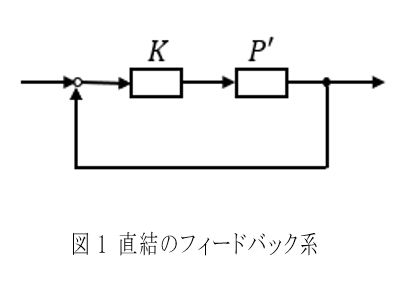
図1に示す直結のフィードバック系において、制御対象P’が乗法的摂動で表現される場合のロバスト安定化条件を導出してみます。
その前段階として重要なものとして「スモールゲイン定理」があります。
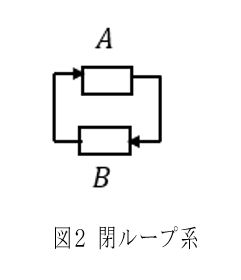
【スモールゲイン定理】
図2において、AおよびBは安定でプロパな伝達関数(分子の次数≦分母の次数)とする。
このとき
|A(jω)B(jω)| < 1, ∀ω
を満たすと図2の閉ループ系は安定になる。
各要素がLTIシステムである限り、目標入力 r などの外部入力や外乱は安定性に影響を与えないため、これらを省略して図3(a)を得ます。
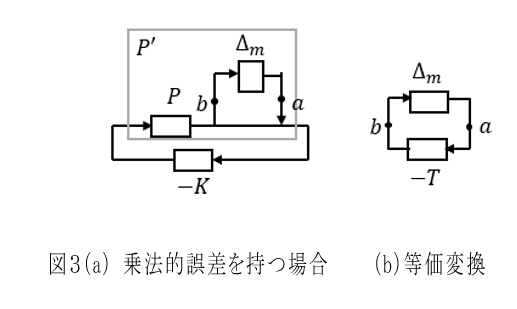
そして、図3(a)において ∆_m を除いたときの点aから点bまでの伝達関数を求めると
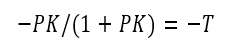
となるので図3(a)は図3(b)に等価変換できます。
図3(b)の閉ループ系を図2に見立ててスモールゲイン定理を適用すると次の条件を得ます。

この式(1)の条件にはモデル化が困難な摂動∆_mを含むため、制御器の設計に用いることができません。
そこで∆_mの代わりに

を満たす既知の安定プロパな伝達関数W_m (s) (これは重み関数や周波数重みなどと呼ばれる)を導入してみます。
このとき

という条件が成り立つならば、これが乗法的摂動に対するロバスト安定化条件となります。
①長所、②短所、③実用例 を挙げます。
①長所: 制御対象の摂動に対して、安全性や制御性能を保証した制御器が求まる
②短所: 理論が難解であったり、設計手順が複雑になったりすることがある
③実用例: 自動車の各種制御系、ハードディスク装置への適用
ロバスト制御の有効な手法の一つとして次に説明するH∞制御というものがあります。
(ⅱ)H∞制御
外乱応答の周波数特性の最小化を図ることにより、外乱に強い制御系を設計できるという特徴を持ちます。
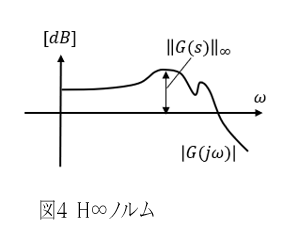
安定伝達関数G(s)のH∞ノルムは
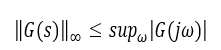
であり、以下の図4に示されるようにH∞ノルムは伝達関数の周波数応答の最大振幅となっています。
ここで、supは上限値を意味し、最大値と置き換えることができます。
つまり、

であると示すことができます。
H∞制御の効用は外乱制御とモデル不確かさに対するロバスト性にあります。
そのため、設計を始める前に、実際に存在する外乱を特定し、影響の大きい外乱を選び出してその出力応答を評価する必要があります。
また、外乱の周波数特性を調べてその見積もりを重みとして重み関数を決定していくことも必要です。
①長所、②短所、③実用例 を挙げます。
①長所: 数値モデルと実際の制御対象の間に誤差があっても、実際の制御対象を安定化するコントローラを設計できる、周波数領域で制御仕様を記述できる
②短所: 時間応答との対応は直接ではない
③実用例: 四輪車両の外乱抑制制御など

四輪車両の外乱抑制制御の実用例について、詳しく見ていきます。
自動車が自動運転するために必要なセンサによって車両の位置の情報をもとに制御することができます。
しかし、センサから得られる情報は常に正確とは限らず、ノイズという外乱が入る恐れがあります。
そこで、ノイズを外乱として想定したシステムに対する制御設計を目指した研究が行われています。
四輪車両は前輪が回転することで進行方向を定め、後輪が駆動することで全ての座標面に移動できます。
しかし、車両は横方向へ移動することができないため、真横の位置への移動は車両を複数回切り替えることで可能になります。
このような自動車モデルは非線形システムとして扱われ、直接的に安定化制御を用いて制御させることは困難なため、別のシステムに変換し、このシステムを安定化する制御入力を用いて四輪車両の移動経路を整定することが目標となります。
H∞制御を用いることで車両の位置の情報に対する外乱を想定した四輪車両の制御が可能になっています。

(ⅲ)ファジィ制御
ファジィ制御には熟練者のノウハウを巧みに規則化し、熟練者並の制御性能を実現する高度知識に基づくファジィ制御と、制御対象も動特性を把握し、それに基づき制御を実現するモデルに基づくファジィ制御があります。
モデルに基づくファジィ制御では、ファジィ集合で表現した制御規則をif…then~(もし…ならば~せよ)形式で表現されるファジィモデルでいくつか作っておき、現実の状態が各ルールのif…部分に適合する度合いを求め、その度合いに見合った制御を進めていきます。
人間の長年のノウハウや人間の勘、コツなど定量的に表現できないデータを扱う場合には、人間が普段用いる曖昧な(fuzzy)言葉(例えば「もう少し」という言葉)を含むことがありますが、そのような意味を汲み取って機器で具現化することができるという特徴を持ちます。
①長所、②短所、③実用例 を挙げます。
①長所: 高度な数学技術は必要なく、現代制御理論を用いることで容易に非線形制御が可能になる
②短所: 初めに非線形システムからファジィモデルを構築する必要がある。設計によっては制御性能が保守的になる可能性がある
③実用例: 家電への応用、発電プラントの制御など

実用例の一つとして全自動洗濯機への適用例を挙げてみます。
ファジィ制御による機能を搭載していない全自動では洗濯・すすぎ・脱水の各時間が固定されていたことから、汚れの量と質に応じた洗濯(エネルギーや時間を適切に節約できる洗濯)が難しいとされていました。
洗濯物の量や汚れの量をセンサによって検知してからファジィ制御により適切な洗濯時間を選び出す機能が備わったことで、洗い残しや洗い過ぎによる布の傷みを軽減し、時間と電気代の節約を可能にすると同時に、汚れを見分けて正しく洗うという制御をワンタッチ操作で洗濯を完結させています。
これまで説明してきた各制御の長所・短所に関してはイメージが付きづらい点もあるかもしれませんが、実用例を見てみるとそれぞれの長所が生かされたところで使われていることが感じられたのではないでしょうか。
ここからは具体的な機器を挙げて、それらと制御がどう関わっているかを説明していきます。
電動パワーステアリング(EPS)
EPSは自動車のハンドル操作に必要な運転者の力をモータによって軽減する機器です。
ステアリングシステムによって運転者の意思に基づく操作が可能になると期待されています。
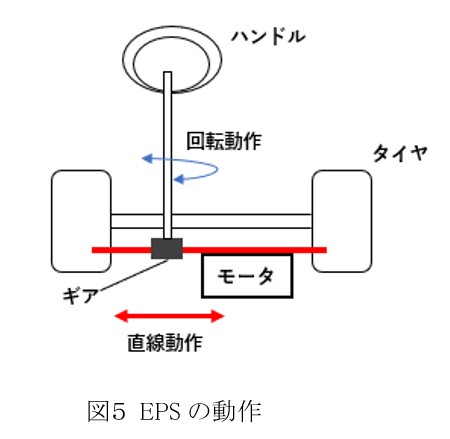
図5のようにハンドルを操舵することで、電気の力を利用してタイヤを任意の方向に変えることができます。
設計手順の一例を示します。
1.基本補正制御設計: モータ慣性モーメントを主とするネガティブな動特性を補正するとともに安定性を確保する基本フィルタを設計する
2.アシスト制御設計: 車両の走行特性に応じて、車両速度ごとの操舵トルク反力を目標値として、操舵トルクに対応したモータのアシスト特性を設計する
3.車両運動制御設計: 車両の基本運動特性に応じて、操舵ダンパ、ハンドル戻り効果などを付与し、人間‐自動車系の動特性を向上させるアシスト特性を設計する
4.微調整: 実走行によって制御パラメータを微調整して目標車両動特性に仕上げる
EPSのメリットとしては燃費効率が良いことが挙げられます。
モータが動力源であり、エンジンの動力を使わないため、必要なときだけパワーステアリングを使うことができ、燃費を向上させることが可能になります。
一方、EPSの使用することで懸念されることとして消費電力の増加があり、EPSを構成する電子部品には、「低損失」「高耐熱」「高精度(温度)」「小型化」が要求されています。
EPSの搭載率は今後増加すると見込まれており、EPSの制御自由性を生かした運転支援システムへの活用などさらに研究が進められると予想されます。

ガスタービン
ガスタービンはディーゼルエンジンやガソリンエンジンと同じ内燃機関の一種であり、吸気・圧縮・燃焼(膨張)・排気というサイクルで作動しています。
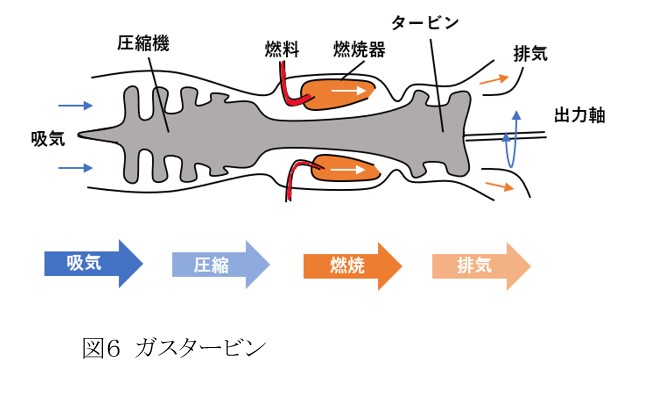
ガスタービンの基本原理は、図6のように、まず空気を遠心圧縮機で圧縮し、この圧縮した空気を燃焼器に導いて燃料を連続的に燃焼させて高温・高圧のガスを発生させます。
産業用ガスタービンはこのガスをタービンで膨張させて得られる回転エネルギーによって前段の圧縮機をまわすとともに、残りのエネルギーを出力軸で取り出します。
ガスタービンの一種として、ジェット噴流を利用して推進力を得るターボジェットエンジンがあります。

ガスタービンの中で構造的に最も簡単であるものの、高速飛行する航空機に適していることから、超音速旅客機、ジェット戦闘機のエンジンとして利用されています。
他にも、ガスタービン始動制御へファジィ制御を適用した例があります。
ガスタービンの始動では、燃料流量をどのように操作して回転数を上昇させるかが重要な点であり、ファジィルールは燃料流量の操作量に対するルールが中心となります。
まず、始動の初期段階では燃料を多く投入しても、燃料エネルギーは回転数の上昇にはあまり寄与せず、燃料ガス温度が上昇します。
そのため、回転数が低い状態では確実に燃料を着火させ、安定な燃焼を維持できる燃料流量を投入すればよいということがわかります。
次に、回転数がある程度まで上昇してくると、燃焼エネルギーが回転数の上昇に寄与するようになり、燃料流量の増減によるフィードバック制御が可能になってきます。
この回転数が高い状態では温度変化によってガスタービンの特性が大きく変わることを注意する必要があります。
温度条件に左右されず、ガスタービンを一定した加速度で昇速するためには加速度を制御するのが適切であると考えられます。
また、吸気温度が高い場合や温態始動の場合には、回転数が低い領域での燃料スケジュール制御や回転数が高い領域での加速度制御において、燃焼ガス温度が上昇しやすくなります。
これらを防ぐため、燃焼ガス温度が高くなったら、制限値を超えないように制御することも必要になってきます。
以上を基に、ファジィルールを構成すると以下のようになります。
ルール1.回転数が低い場合→燃料スケジュール制御により燃料流量を操作する
ルール2.回転数が高い場合→加速度制御により燃料流量を操作する
ルール3.排ガス温度が高い場合→排ガス温度制御により燃料流量を操作する

ロボット制御
ロボットの動作や挙動を管理することで所定の動作を行わせるための技術です。
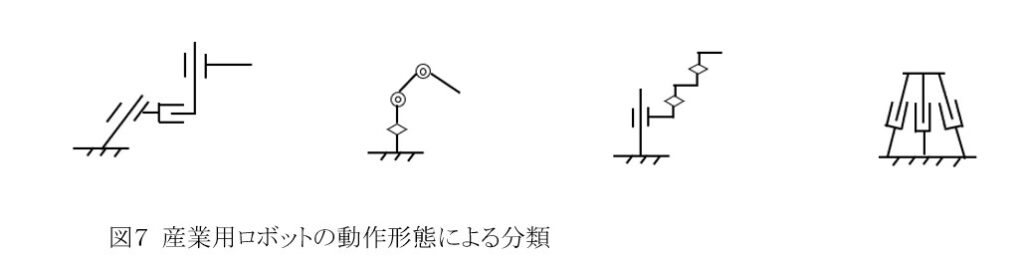
産業用ロボットは、その動作形態により分類され、現在では図7のように垂直多関節、パラレルリンク、水平多関節、直角座標のものが多く用いられています。
例えばロボットアームの動作を制御する際には位置制御や力制御が必要とされます。
位置制御は、ロボットアームの手先の位置や各関節の角度を任意の位置や角度に動かすように制御することを指します。
一方、力制御は、ロボットアームの手先や各関節に加わる力が適切になるよう制御することを指します。
力制御は力を検出する仕組みを必要とするため、位置制御と比べて制御アルゴリズムが複雑になります。
しかし、どちらか一方のみの制御でロボットアームを動作させると適切な制御ができなくなる場合があるため、2つの制御を組み合わせて動作させることが一般的です(加えて位置情報を微分すると得られる速度情報を用いた速度制御も組み合わせることもある)。

ロボットアームは製造業で広く使用されており、特に自動車や家電製品の組み立てラインで活躍する機会が多く見られます。
自動車製造の一例としては、ドアの取り付け、エンジンの組み立て、塗装作業などがあります。高速かつ精密に作業をこなせるため、組み立て効率の向上が期待されています。
さいごに
生活に無くてはならないだろうと思わせる「制御」について、活用例から身近に感じていただけたら幸いです。
弊社では制御システムの開発受託に加え、機械部品の設計、製造まで一貫して国内外の拠点で行っておりますので、ご興味があればお気軽にお問い合わせください!
参考資料
・ https://www.coronasha.co.jp/np/data/tachiyomi/978-4-339-03311-3.pdf
・ https://www.jstage.jst.go.jp/article/jacc/67/0/67_879/_pdf/-char/ja
・https://www.jstage.jst.go.jp/article/kaihatsukogaku1984/12/1/12_1_38/_pdf/-char/ja
・ https://industrial.panasonic.com/jp/ss/technical/ap10
・ https://www.khi.co.jp/energy/gas_turbines/outline.html
・ https://go.orixrentec.jp/rentecinsight/robot/article-69
・ 制御の辞典, 朝倉書店, p.112-118, 257, 319, 384, 402-403